반응형
/*
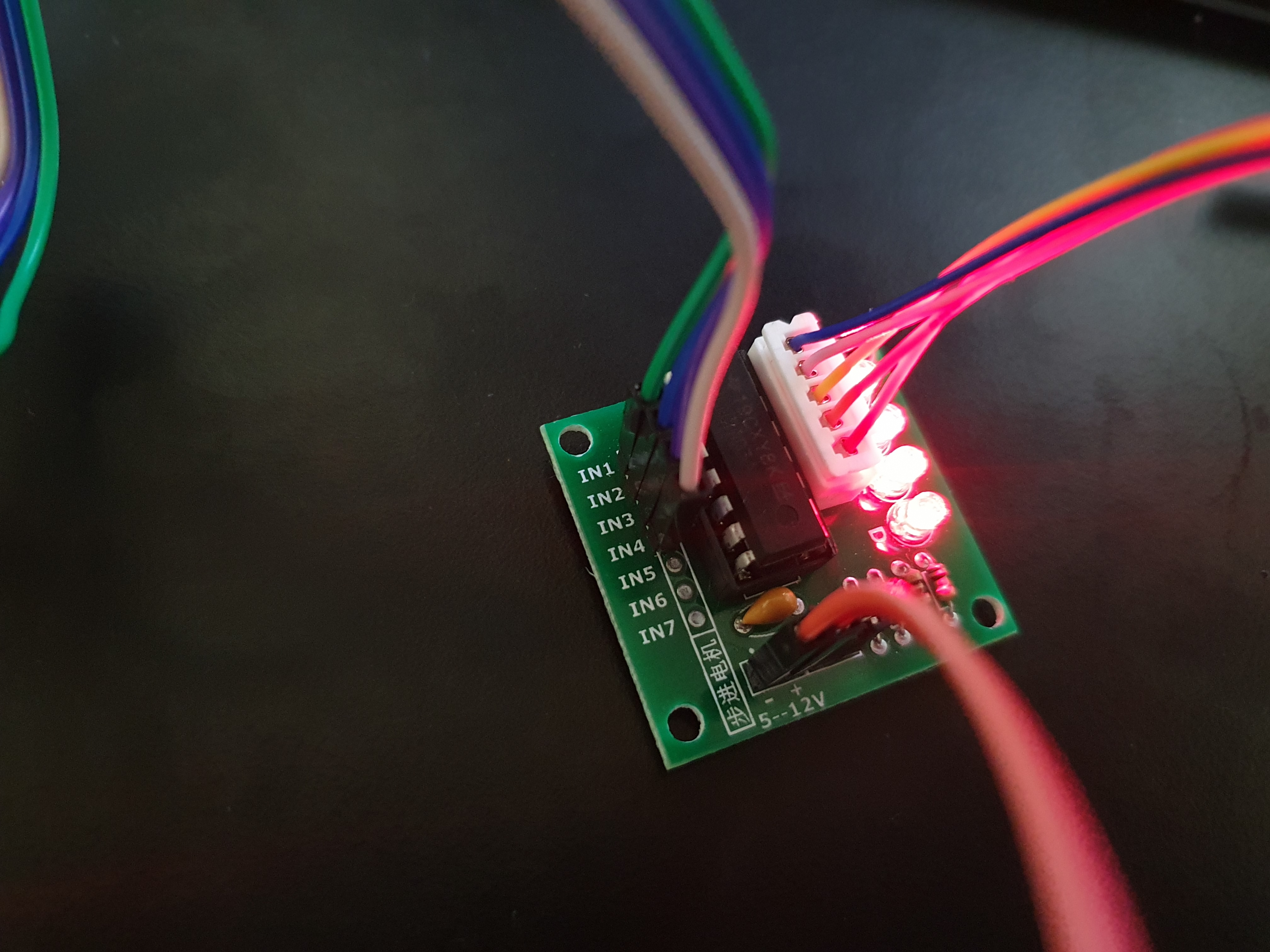
Stepping Motor 5v model.28BYJ-48
Stepping Motor Driver board
Foward, Reverse rotation
*/
#include <Stepper.h> // load library
int steps = 2048; // one-round value(in case of 28BYJ-48)
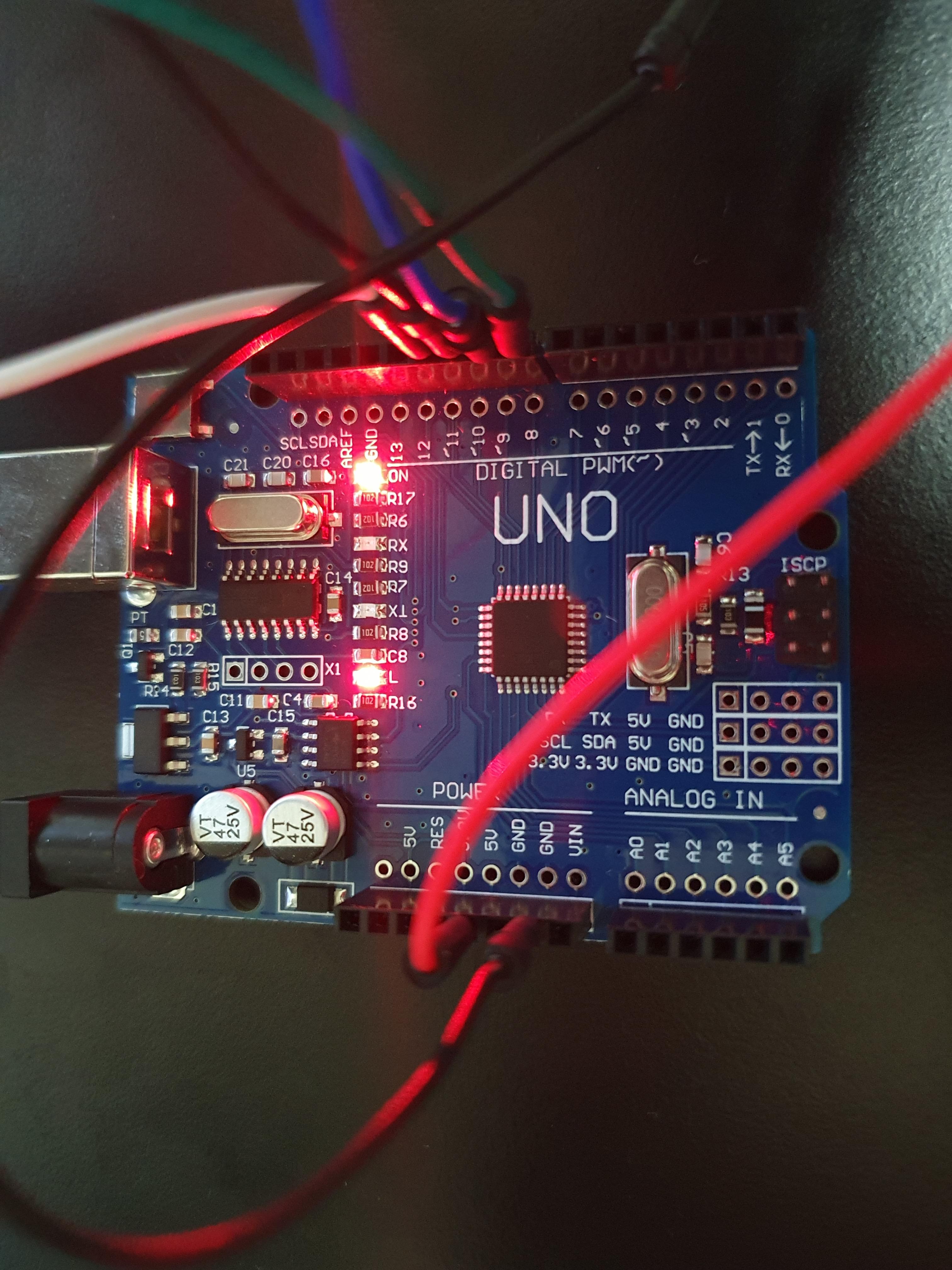
Stepper stepper(steps, 11, 9, 10, 8); // Declare stepMotor object(INT4, INT2, INT3, INT1)
void setup()
{
stepper.setSpeed(10); // rpm
}
void loop()
{
stepper.step(steps); // steps, 2048 Forward one-round
delay(1000);
stepper.step(-steps); // steps, -2048 Reverse one-round
delay(1000);
}
#include <Stepper.h> // 스텝모터 라이브러리 불러옴
int steps = 2048; // 한바퀴에 해당하는 값 선언(28BYJ-48인 경우 2048로)
Stepper stepper(steps, 11, 9, 10, 8); // 스텝모터 객체 선언 (INT4, INT2, INT3, INT1) 순
void setup() {
stepper.setSpeed(2); // rpm : 1분당 도는 횟수, 너무 큰값을 하면 안돌아감
}
void loop() {
for(int ii=0; ii<=4; ii++){ // 총 4회 반복
stepper.step(steps/360*90); // 1회에 90도씩 회전
delay(500); // 0.5초간 쉼
}
for(int ii=1; ii<=60; ii++){ // 60회 반복
stepper.step(steps/360*6); // 1회에 6도씩 회전(시계 초침)
delay(500); // 0.5초간 쉼 -> 0.5초간 초침 움직이고 0.5초간 쉼: 1초
}
}반응형
'Firmware & Embedded > Components' 카테고리의 다른 글
| L9110S (Motor Driver Module) (0) | 2022.11.16 |
|---|---|
| Joystick module (0) | 2022.11.08 |
| Arduino Serial (to Python) (0) | 2022.10.31 |
| Sequential Brightness LED using Button (0) | 2022.10.14 |
| Alarm operation based on distance using ultrasonic sensor (0) | 2022.10.14 |